This project is still quite early in development. I'm also comissioning it for a customer, therefore unfortunately its going to be quite vague. The customer owns a tank cleaning business and I was interested to see how much easier his job would become if he could remotely control a tank cleaning robot, instead of using a big pole looking through a hole that's about 500mm in diameter. Here is a photo of what the process looks like.

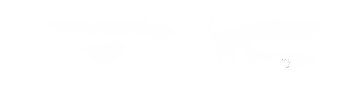
Definitely does not look like the most comfortable job if you ask me . Currenlty I have made the frame as well as a motherboard, BMS, and controller. I will have some better photos and information as I make more progress, for now I'll just show a collection of photos of the progress i've made. I'm still yet to water proof the components.
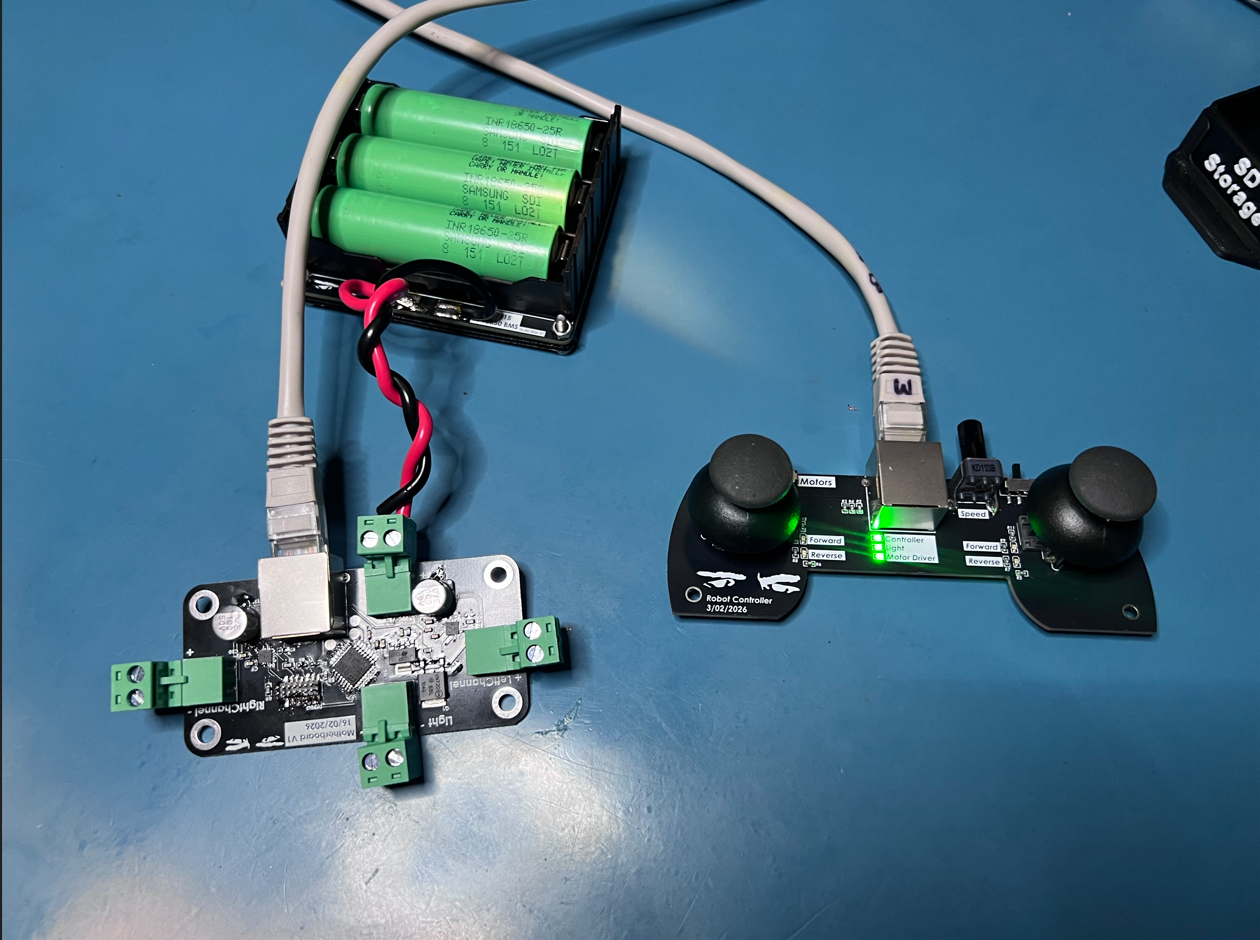


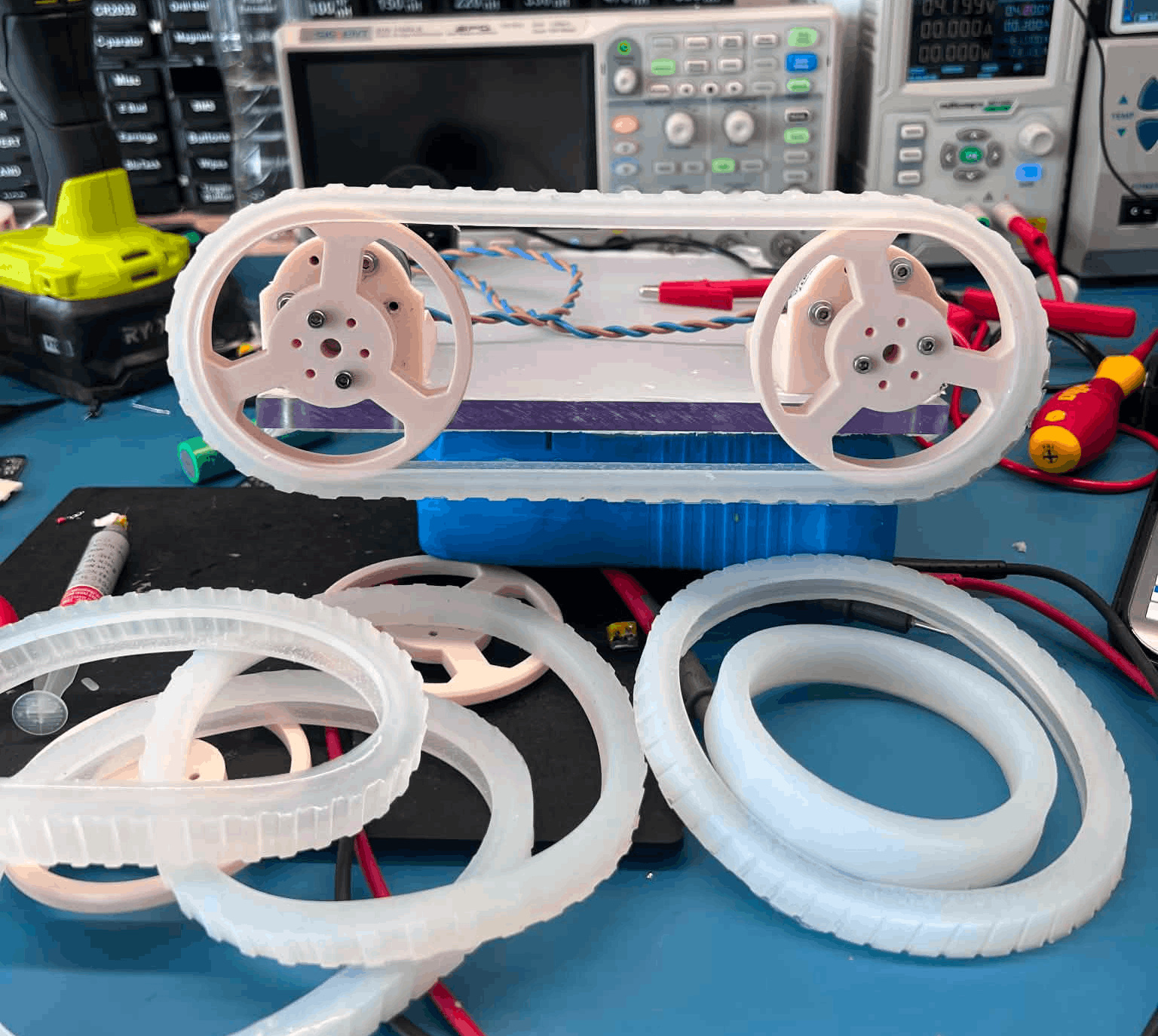
Currently I'm trying to get some working tracks, the blue tracks in the photos are made from TPU with a 3D printer. With how the FDM structures are made line by line, bending it into a oval shape really didn't, not only that but it was too hard of a material. There was no readily available tracks online that werent prohibitly expensive.
I made the decision to make my own tracks with silicone rubber. I would 3D print a mould for the track and the pour the silicone to shape the track. After many revisions, trying all sorts of different track geometries, it seems the hardness of the silicone I have is too soft (30A). I'm currently waiting on a shipment of 45A silicone, this should be rigid enough to not fold over itself.